
The era of bespoke, billion-dollar planetary exploration is undergoing a radical paradigm shift. As the cis-lunar economy accelerates, the demand for scalable infrastructure has catalyzed the rapid development of commercial lunar rovers. Unlike legacy flagship missions—such as NASA’s Perseverance, which relies on custom, heavily shielded radiation-hardened (Rad-Hard) avionics—this new wave prioritizes cost-efficiency and rapid deployment.
Historically, the prohibitive cost of autonomous space navigation stemmed from custom-built hardware and extensively redundant sensor arrays. Legacy systems depend on expensive, legacy processors like the BAE RAD750 (operating at a highly constrained 200 MHz) and demand massive SWaP (Size, Weight, and Power) overheads to guarantee absolute mission survival. However, scaling lunar operations requires a decisive departure from these monolithic architectures.
The engineering solution lies in leveraging modular designs and Commercial Off-The-Shelf (COTS) components. By drastically reducing the hardware footprint and accepting calculated operational risks, aerospace engineers are forcing a critical evolution in software architecture. To compensate for less robust sensory inputs and severely restricted computational budgets, autonomous navigation AI must become exponentially more efficient.
This article provides a technical analysis of how modern commercial lunar rovers are bridging the gap between scientific constraints and commercial agility. We will examine how engineered solutions—from lightweight Simultaneous Localization and Mapping (SLAM) algorithms to optimized, vision-based Hazard Avoidance—are bypassing hardware limitations to scale autonomous mobility and unlock the new lunar economy.
From Government Monopoly to Commercial Proliferation
For decades, planetary surface mobility was heavily restricted by a strict government monopoly. Flagship space programs relied on bespoke, monolithic architectures where hardware failure was simply not an option. Institutional rovers like Perseverance are built around heavily shielded, Radiation-Hardened (Rad-Hard) components, pushing the total mission lifecycle costs well into the billions of dollars.
Today, the aerospace industry is experiencing a massive paradigm shift toward Commercial Off-The-Shelf (COTS) components and modular platforms. By integrating automotive-grade or high-end industrial sensors rather than custom-built, space-qualified hardware, commercial entities are drastically lowering the barrier to lunar entry. This strategy accepts a statistically higher risk of hardware degradation due to radiation, but it enables rapid, cost-effective iteration.
However, this dramatic reduction in hardware redundancy forces a necessary and radical innovation in navigation AI. When engineers strip away heavy LIDAR arrays, redundant star trackers, and massive battery banks to meet strict mass limits, the burden of mission survival shifts entirely to the algorithmic layer. We are now entering the era of the software-defined rover.
Because commercial rovers lack the hyper-precise sensory inputs of their institutional counterparts, they must rely on advanced software to compensate for hardware deficiencies. This shift requires engineers to focus on:
- Probabilistic State Estimation: Utilizing advanced mathematical models, such as Extended Kalman Filters (EKF), to derive accurate localization and mitigate drift from cheaper, noisier Inertial Measurement Units (IMUs).
- Edge Computing AI: Deploying highly compressed, lightweight neural networks for real-time terrain classification, bypassing the need for computationally expensive 3D point-cloud processing.
- Adaptive Resource Management: Coupling pathfinding algorithms tightly with power management protocols, ensuring the rover can autonomously alter its route if sensor degradation or thermal constraints occur.
Space Applications Services and the LUVMI-X Platform

Space Applications Services (SAS) is pioneering a targeted approach to lunar exploration with the LUVMI-X (Lunar Volatiles Mobile Instrument – Extended) platform. Unlike generalized scientific rovers, LUVMI-X is an agile, low-mass system engineered for a highly specific, resource-driven mission profile. Its primary objective is the precise detection and mapping of water ice and other critical volatiles in the demanding lunar polar environments.
Targeted Navigation for Volatiles Scouting
Operating near the lunar South Pole requires descending into Permanently Shadowed Regions (PSRs), where temperatures plummet and ambient solar illumination is completely non-existent. The LUVMI-X architecture tackles this absolute darkness through specialized active illumination systems that are tightly integrated with its sensory suite.
Instead of relying on passive lighting like traditional equatorial rovers, the platform utilizes low-power, high-intensity LED arrays to illuminate the immediate local terrain. This artificial lighting is not static; it is dynamically pulsed and perfectly synchronized with the exposure times of the rover’s navigational cameras (NavCams).
This synchronization prevents optical washout of the sensors and strictly minimizes energy consumption, which is a critical operational constraint when solar panels cannot generate power. Furthermore, the pathfinding algorithms are heavily weighted by thermal and power parameters. The system dynamically calculates the maximum safe ingress duration into a cold-trap before the rover must autonomously execute a retreat to a sunlit ridge to recharge its COTS battery packs.
The Tech Stack: Light-Weight SLAM
The core of LUVMI-X’s autonomy relies on a highly optimized Simultaneous Localization and Mapping (SLAM) architecture. Institutional space missions often utilize dense, computationally heavy spatial algorithms that generate and process millions of 3D point-cloud vertices per second.
Commercial platforms, however, are restricted by significantly lower computational bandwidth, often utilizing low-power ARM-based microcontrollers rather than power-hungry, high-end avionics. To compensate for this restricted processing capability, the navigation software stack relies on Light-Weight SLAM techniques, specifically leaning on sparse Visual-Inertial Odometry (VIO).
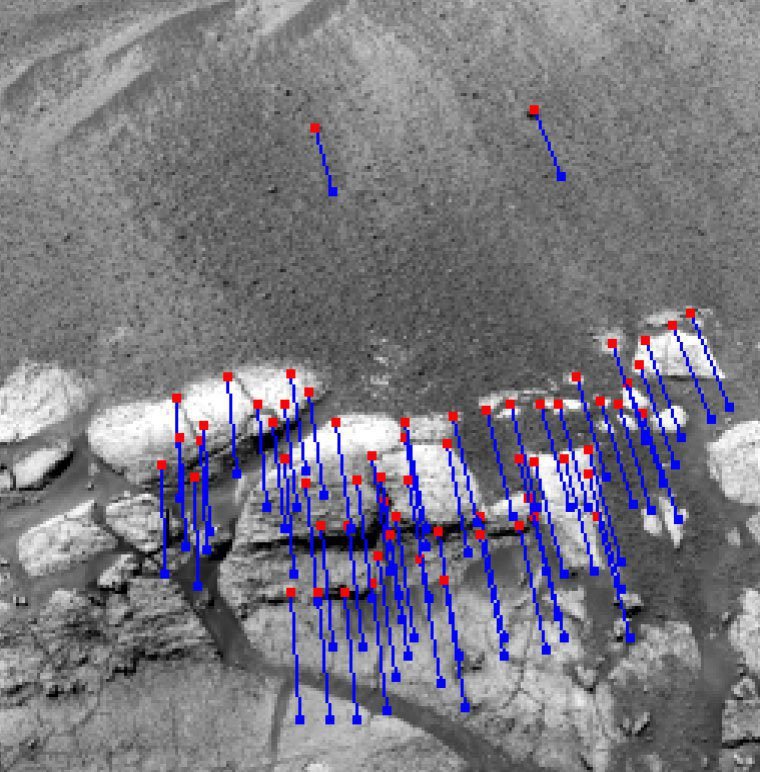
Rather than rendering dense geometric meshes of the lunar surface, the algorithm identifies, extracts, and tracks only a subset of high-contrast visual features—such as sharp crater rims or distinct regolith variations—across consecutive camera frames. This visual feature-tracking is then fused with high-frequency data from the Inertial Measurement Unit (IMU).
To process this sensor fusion efficiently without overwhelming the CPU, the system employs mathematical models like the Extended Kalman Filter (EKF). This sparse probabilistic approach drastically reduces the memory footprint and algorithmic latency. Consequently, the commercial rover maintains highly accurate local state estimation and executes reliable Hazard Avoidance without requiring the massive, expensive hardware overhead of legacy space agency systems.
Astrobotic’s CubeRover: The Standardization of Lunar Mobility (USA)
Scalability and COTS Integration
Developed in close collaboration with Carnegie Mellon University (CMU), Astrobotic’s CubeRover represents the first true standardization of planetary surface mobility. By directly adapting the highly successful CubeSat form factor to lunar robotics, this architecture introduces scalable, modular chassis configurations categorized into standardized 2U, 4U, and 6U volumes.
This plug-and-play methodology drastically reduces engineering development cycles and integration costs, establishing a baseline for commercial payload delivery. However, condensing a functional rover into a shoebox-sized volume imposes extreme SWaP (Size, Weight, and Power) constraints on the entire system design.
To remain operational within these aggressively tight mass and thermal budgets, the CubeRover must abandon traditional, heavy space-rated electronics. Instead, the platform relies on a strictly minimalist sensor architecture powered by carefully selected and validated Commercial Off-The-Shelf (COTS) processors and components.
Vision-Based Navigation on a Micro-Scale
Operating under such severe mass limitations dictates that the CubeRover cannot accommodate high-fidelity 3D LIDAR scanners, motorized gimbals, or redundant arrays of navigational sensors. Consequently, the platform’s autonomy architecture shifts the computational burden of Hazard Avoidance and spatial awareness entirely onto low-power optical sensors.
The system is highly dependent on Vision-Based Navigation (VBN), utilizing miniaturized passive stereo cameras to perceive the lunar terrain. By actively processing these dual optical feeds, the rover’s onboard microcontrollers generate lightweight disparity maps to estimate depth, geometry, and immediate kinematic obstacles without overwhelming the CPU.
To track its exact position over time without relying on heavy, power-hungry inertial systems, the CubeRover executes highly optimized Visual Odometry (VO) algorithms. By continuously analyzing and tracking high-contrast pixel variations between consecutive optical frames, the software accurately calculates the rover’s translation and rotation, ensuring reliable micro-scale pathfinding across the harsh lunar regolith.
Australia’s Roo-ver: A Case Study in Semi-Autonomous Regolith Collection

The AROSE and EPE Consortium Approach
The Australian Space Agency, through its ambitious Trailblazer program, is financing the development of Roo-ver, a pivotal asset for early lunar resource logistics. Engineered by the AROSE (Australian Remote Operations for Space and Earth) consortium in strategic collaboration with EPE, this 20-kilogram class surface vehicle is optimized strictly for material retrieval rather than broad scientific surveying.
Scheduled to deploy on a near-term NASA Artemis mission, Roo-ver’s core mandate is to excavate and transport lunar soil to a NASA-operated extraction facility. As outlined by the consortium’s systems engineers, this highly targeted logistical objective demands a specialized, semi-autonomous navigation architecture that prioritizes absolute mechanical reliability over extensive range.
Autonomous ISRU Operations
The foundation of Roo-ver’s mission architecture revolves around In-Situ Resource Utilization (ISRU), a critical operational requirement for sustaining long-term lunar outposts. To successfully facilitate the extraction of trapped oxygen from the lunar regolith, the rover must autonomously execute highly repetitive, precision-guided collection cycles between designated excavation zones and the processing lander.
However, executing these continuous autonomous transits introduces a severe navigational constraint: the absolute necessity of maintaining an unbroken Line-of-Sight (LOS) with the base station. Because Roo-ver utilizes the lander as its exclusive telecommunications relay back to Earth, the onboard spatial awareness engine must continuously compute and verify RF signal propagation across the undulating local topography.
To enforce this critical communication link, the rover’s pathfinding stack integrates a deeply modified, cost-based heuristic model. The autonomous navigation algorithms mathematically penalize any planned trajectory that ventures behind large lunar boulders or descends into localized craters that could occlude the data link. Consequently, the system actively dictates a highly conservative Hazard Avoidance strategy, ensuring continuous telemetric oversight throughout the entire ISRU excavation process.
The Navigation Challenge: Commercial Agility vs. Scientific Constraints
Institutional planetary missions operate under rigid fault-tolerance policies where a catastrophic mechanical failure is completely unacceptable. Flagship rovers historically employ highly conservative navigation protocols, frequently alternating between heavily vetted, Earth-commanded “drive-blind” segments and meticulously slow autonomous modes. Legacy AutoNav systems, for example, must process incredibly dense stereoscopic meshes and evaluate thousands of simulated trajectories, resulting in extremely cautious movements—often averaging just centimeters per second—to guarantee absolute vehicle safety.
In stark contrast, the emerging lunar economy demands high-tempo operations, continuous mobility, and rapid surface coverage. To achieve these aggressive metrics, commercial architectures actively substitute the heavy, expensive redundancy of institutional platforms with calculated algorithmic risk. By consciously loosening the stringent safety constraints embedded within their navigation stacks, these agile rovers prioritize mission velocity over perfect survivability, accepting a statistically higher probability of hardware degradation to meet strict commercial deadlines.
This philosophical divergence fundamentally alters the underlying mathematics of the rover’s spatial planning software. Systems engineers face a continuous, hard algorithmic trade-off between enforcing a highly conservative Hazard Avoidance protocol and maximizing the vehicle’s total operational speed. Institutional software aggressively dilates identified obstacles within the local costmap, creating massive mathematical safety buffers that frequently force the rover into complex detours or trigger false-positive pathing failures.
Commercial platforms optimize their pathfinding heuristics to significantly minimize these artificial obstacle inflations within the memory. By commanding algorithms like A* or D* Lite to plot trajectories that hug closer to known hazards, the system drastically reduces computational latency and enables continuous, fluid traversal. This streamlined mathematical approach maximizes the rover’s kinematic efficiency, proving that in modern lunar logistics, software agility is a far more valuable asset than impenetrable mechanical endurance.
Conclusion: The Infrastructure for a Lunar Economy
The current trajectory of space exploration proves that the future does not belong exclusively to billion-dollar, monolithic scientific laboratories. Platforms like SAS’s LUVMI-X, Astrobotic’s scalable CubeRovers, and the AROSE consortium’s Roo-ver represent a fundamental and necessary shift in aerospace engineering. Rather than general-purpose explorers, these agile vehicles are effectively the automated logistics “forklifts” of the new cis-lunar economy. Engineered for rapid deployment and highly specific, repetitive tasks, these architectures prove that modular, COTS-based systems can successfully establish an industrial foothold on the lunar surface.
This commercial proliferation marks the definitive maturation of planetary robotics. What was once an experimental, heavily shielded scientific luxury—reserved for flagship missions with massive computational budgets—has rapidly evolved into an indispensable engineering commodity. By aggressively optimizing mathematical models, from Light-Weight SLAM to low-power Visual Odometry, engineers have successfully decoupled software intelligence from hardware mass. Autonomy is no longer a bespoke feature; it is the fundamental operating system of commercial spaceflight.
As humanity transitions from purely scientific surveying to sustained In-Situ Resource Utilization (ISRU) and lunar base construction, this scalable autonomy will determine the economic viability of off-world operations. The extraction of water ice and the processing of lunar regolith require high-tempo, continuous robotic workflows that legacy space agency architectures simply cannot scale to meet. Ultimately, the new lunar gold rush will not be won by the heaviest, most heavily armored vehicles, but by the most mathematically efficient, software-defined fleets.

Lascia un commento