Menu
Chiudi
Home
Blog
About
Cerca
Home
Blog
About
Cerca
Beyond The Joystick
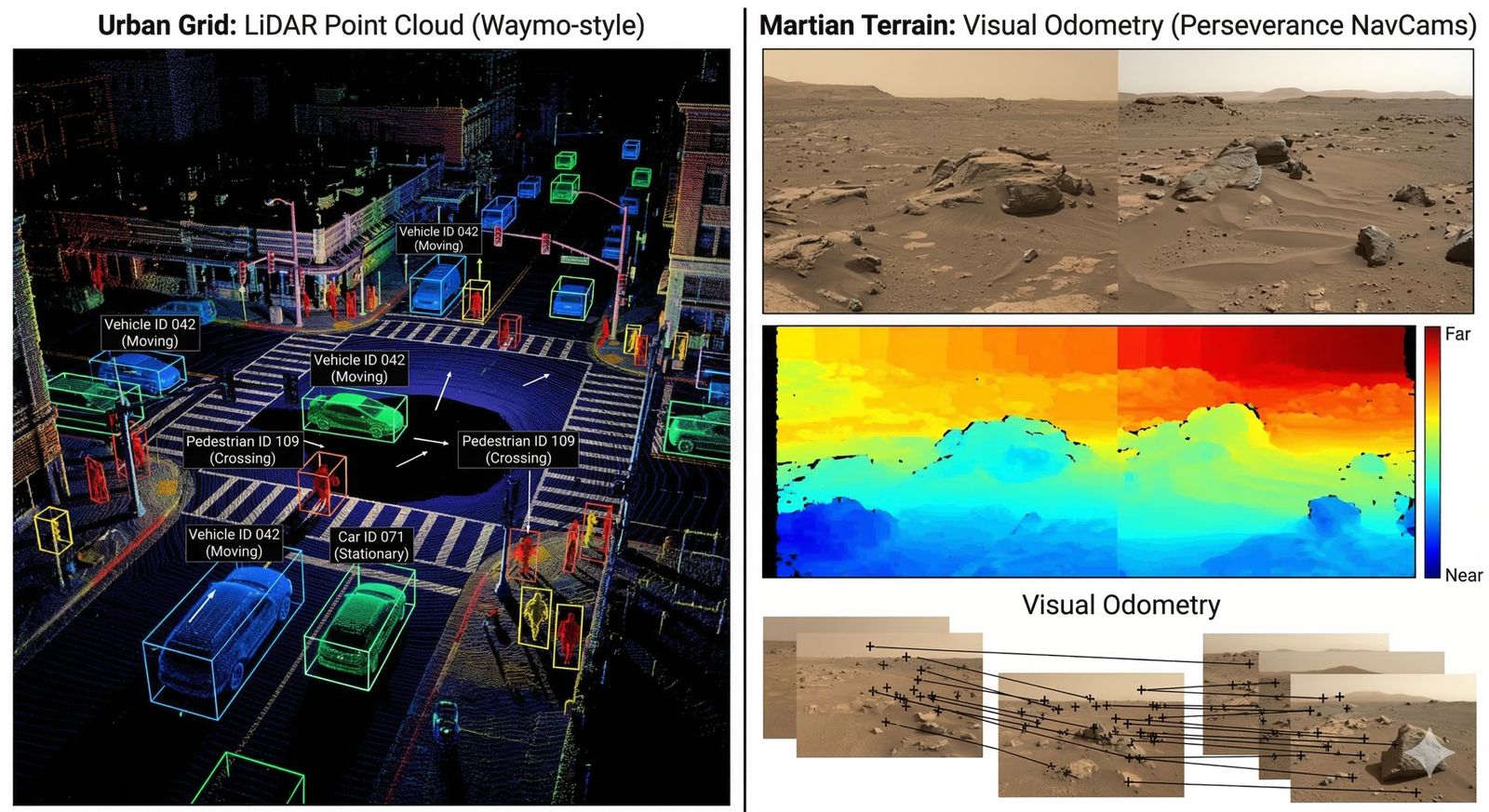
What Self-Driving Cars Can (and Can’t) Teach Space Rovers
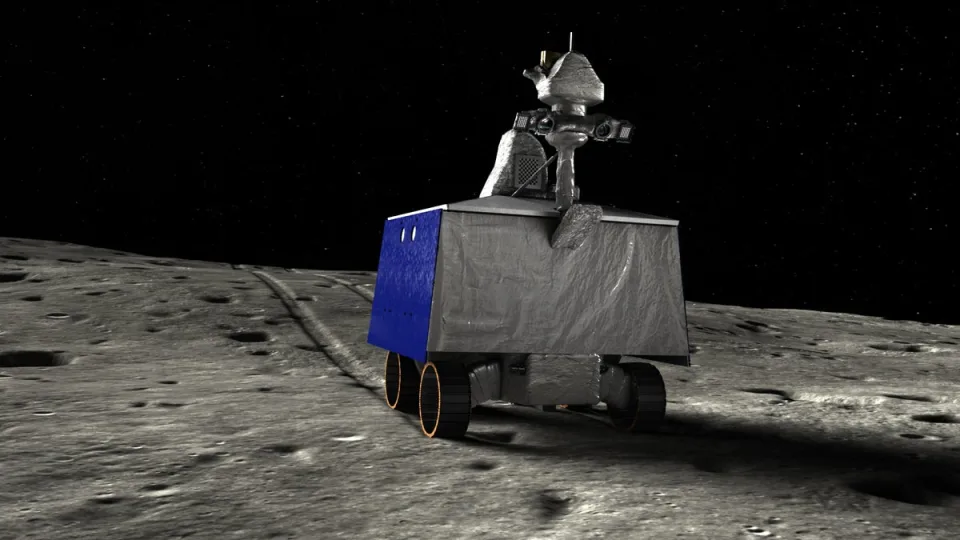
VIPER: The New Challenge of AI Navigation in Permanent Moon Shadows
Beyond Reconstruction: Zero-Shot Anomaly Detection of Telemetry with TimeRCD
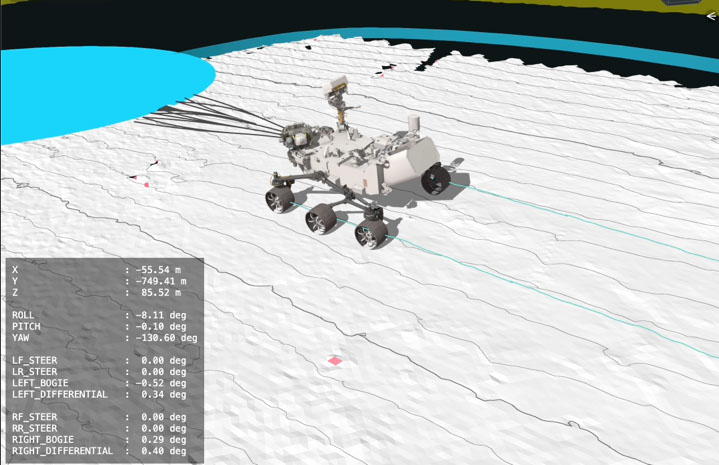
Generative AI Rover Navigation: Technical Analysis of Claude Integration on Mars
Automotive vs. Space LiDAR: Why Your Car’s Sensor Can’t Survive Mars
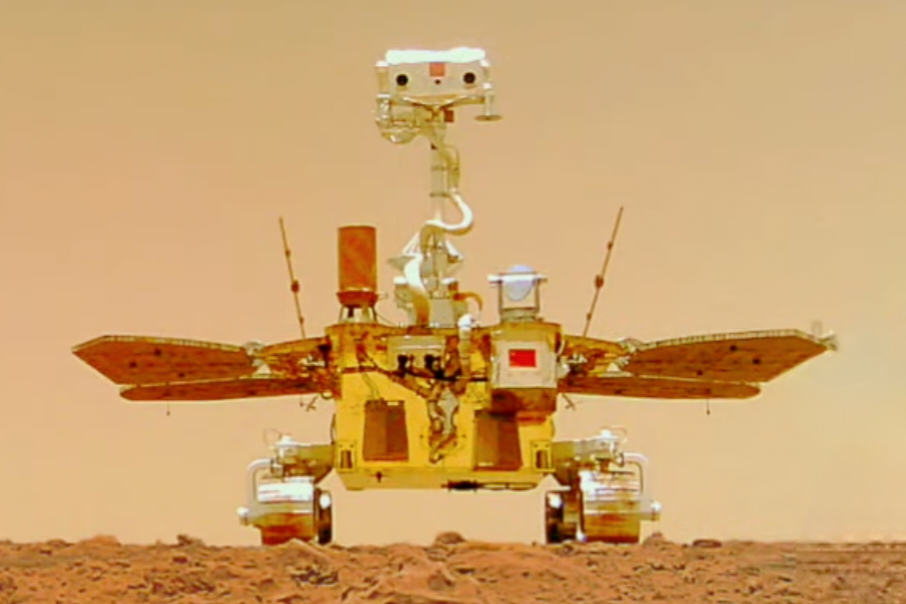
Beyond NASA: A Look at the AI Inside China’s Zhurong Mars Rover
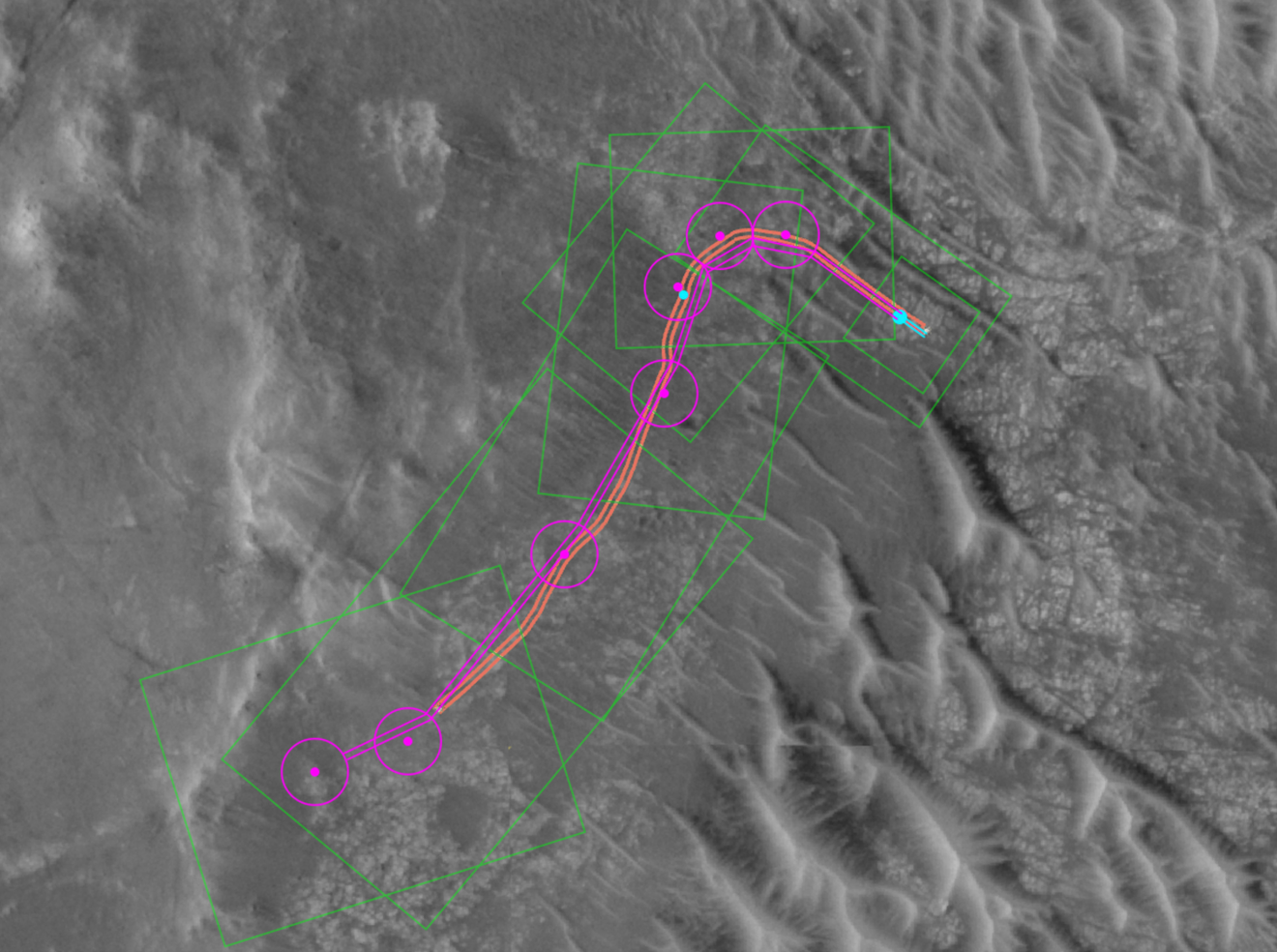
A Deep Dive into Visual Odometry: How Rovers Know ‘How Far’ They’ve Gone
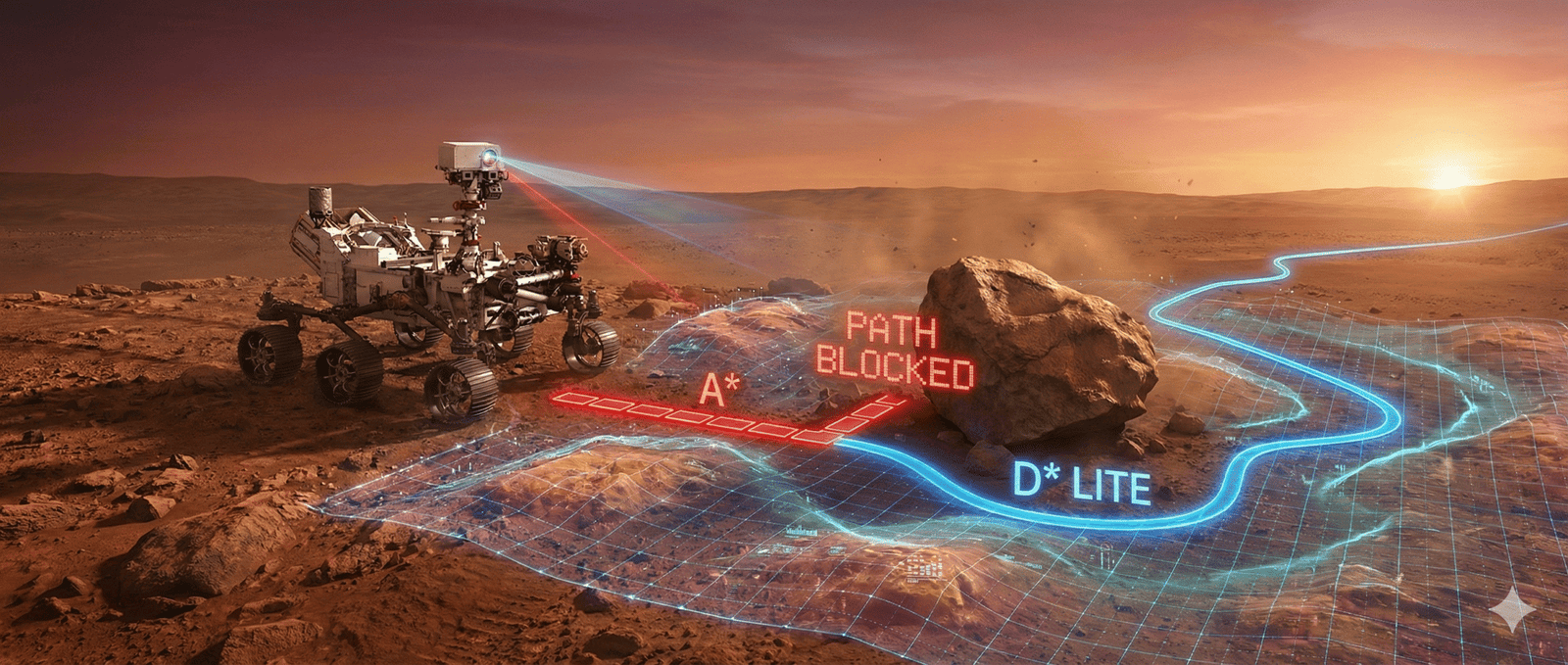
A* vs. D* Lite: The Pathfinding Algorithms That Choose a Rover’s Route
Rover Perception Systems: How LiDAR, Stereo Vision, and IMUs Work Together
What is SLAM? The Key Technology for Autonomous Rover Mapping
The Evolution of Rover AI: A Deep Dive From Sojourner to AutoNav
The 20-Minute Lag: Why We Can’t Just ‘Joystick’ Mars Rovers
The Ultimate Guide to Autonomous Rover Navigation
Support
×
 Support
Support