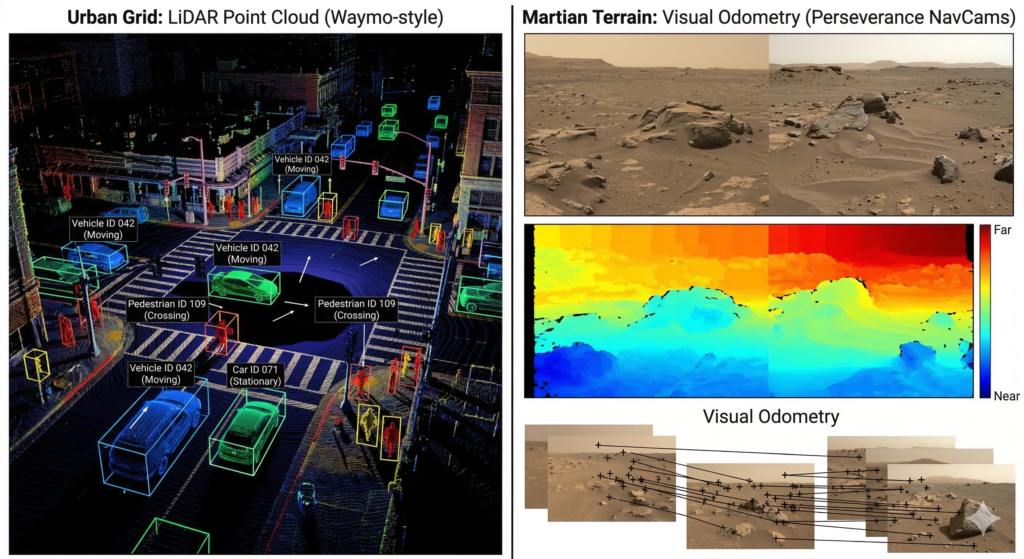
The convergence of terrestrial autonomous vehicles and planetary rovers reveals profound algorithmic and architectural intersections. While self-driving cars process immense data using high-performance processors in structured environments, space rovers navigate unstructured, high-radiation terrains constrained by severe power limits and communication latency, historically relying on legacy rad-hardened hardware. Today, this paradigm is shifting. The aerospace sector is actively integrating automotive Deep Reinforcement Learning, hybrid computing, and photorealistic simulations to achieve robust autonomous navigation. Conversely, the automotive industry leverages space-proven fault-tolerance and remote teleoperation strategies to master complex urban edge cases, driving a mutual evolution in robotics.
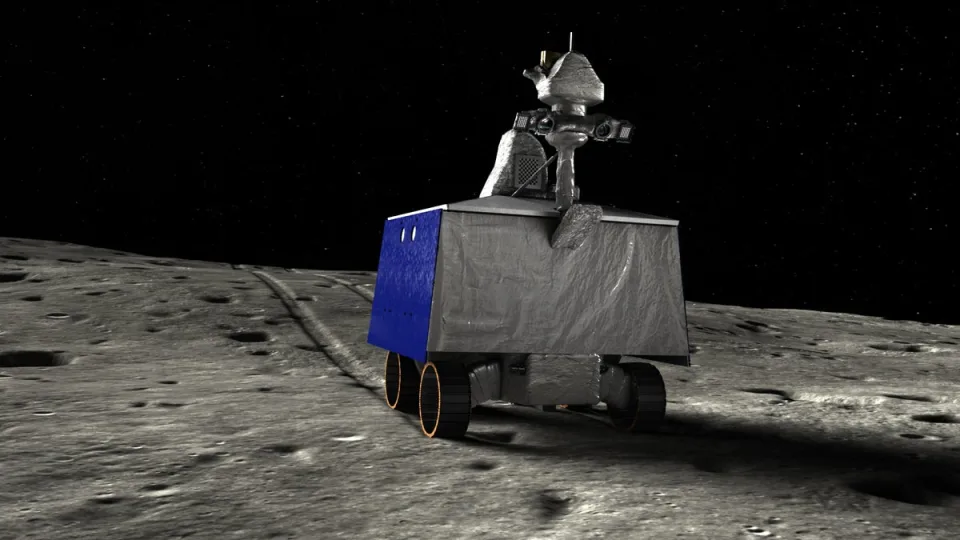
This article provides a comprehensive engineering review of the VIPER rover AI navigation system, designed for the extreme conditions of lunar Permanently Shadowed Regions (PSRs). Resurrected for a 2027 Blue Origin launch, VIPER abandons traditional passive solar navigation. Instead, it employs active LED illumination and robust visual odometry to counteract dynamic shadowing. To ensure survival in cryogenic darkness, the architecture leverages computationally efficient grid-based algorithms like D* Lite for real-time hazard avoidance and Extended Kalman Filters (EKF) for precise kinematic slip estimation on porous regolith. Ultimately, VIPER’s hybrid “Earth-in-the-Loop” autonomy establishes the technical baseline for future Artemis surface operations.
Space telemetry analysis is shifting from reconstruction-based models like TadGAN to Zero-Shot Anomaly Detection. Traditional generative models struggle in deep space, suffering from overfitting and failing to identify unprecedented operational faults. The TimeRCD framework introduces a paradigm shift via the Relative Context Discrepancy (RCD) approach. Instead of reconstructing nominal data, TimeRCD measures vector discrepancies between local and global temporal contexts using pre-trained Foundation Models. Validated on NASA’s SMAP and MSL datasets, this zero-shot architecture drastically cuts false positives, reduces computational loads on Rad-Hard processors, and paves the way for true onboard spacecraft autonomy.
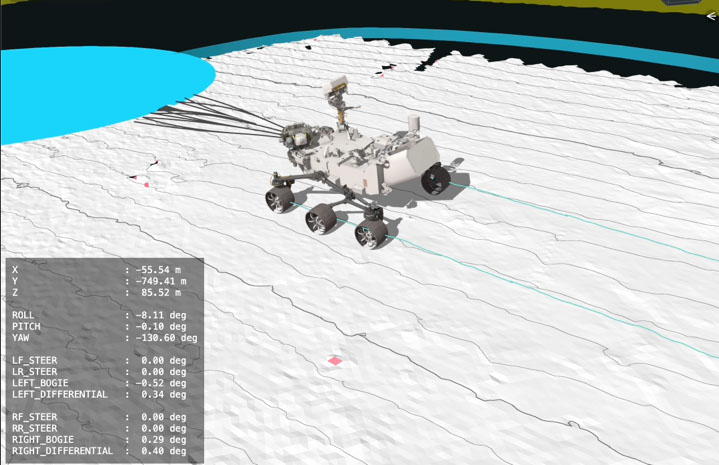
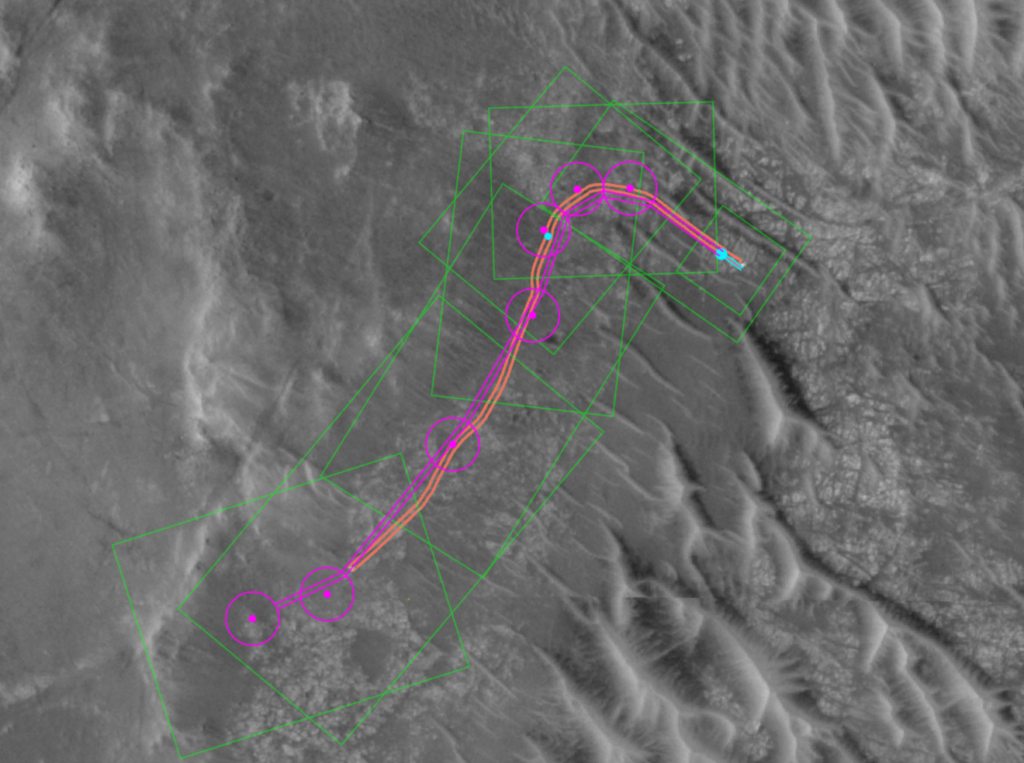
This technical report analyzes the pivotal event of Sol 1707-1709, where Perseverance navigated Mars guided by the Claude Code AI agent. For the first time, an LLM was integrated into the critical path, generating executable Rover Markup Language (RML) code. This “Ground-in-the-Loop” paradigm transcends traditional AutoNav limitations through semantic terrain analysis and terrestrial computing power. Rigorously validated via Digital Twin simulation, the AI successfully directed 456 meters of autonomous driving. This milestone demonstrates Generative AI’s capacity to control physical assets in critical environments, redefining space exploration standards.
Why doesn’t NASA use standard self-driving car sensors on Mars Rovers? It seems cost-effective, but the reality is harsh. This article dives into the Automotive vs. Space LiDAR debate, analyzing why terrestrial tech—like Luminar’s Iris—fails off-planet. We break down the engineering nightmares of space: deadly cosmic radiation, vacuum outgassing, and extreme thermal cycles that shatter standard electronics. By comparing commercial efficiency against NASA’s reliability, we explain why “good enough” for Earth is fatal on Mars. Plus, discover the surprising exception where a $129 drone part actually made it to the Red Planet.
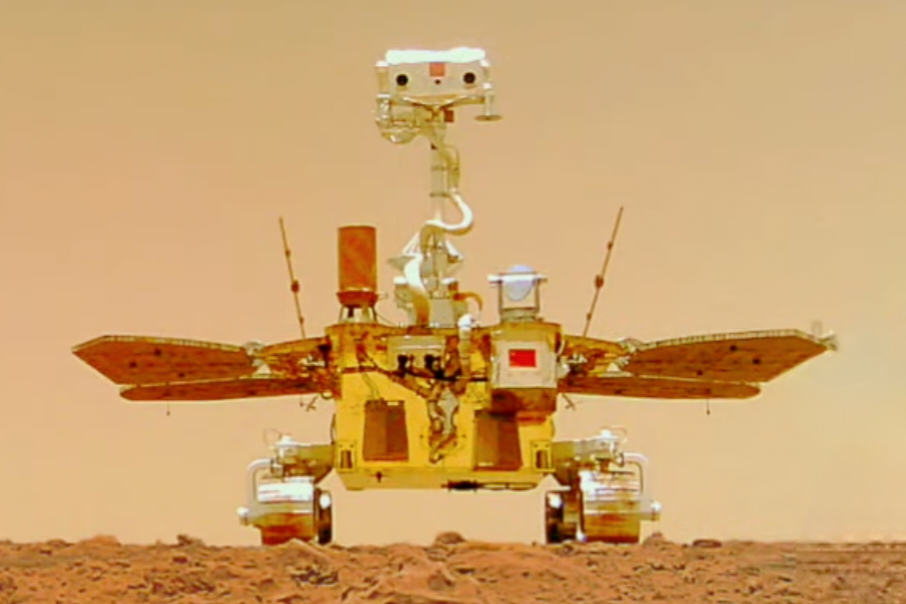
his analysis explores the technical architecture of China’s Zhurong rover, highlighting how it differs from NASA’s design philosophy. Operating in Utopia Planitia, Zhurong utilizes a hierarchical pathfinding system that combines $A^*$ for global route planning with $D^*$ Lite for dynamic obstacle avoidance. To survive without nuclear power, it employs autonomous “wake/sleep” algorithms based on environmental conditions. Furthermore, the rover mitigates dangerous high-slip interactions using unique active suspension capable of “inchworm” motion and crab walking, allowing it to successfully map geology and hydrated minerals far beyond its nominal 90-sol lifespan.
 The convergence of terrestrial autonomous vehicles and planetary rovers reveals profound algorithmic and architectural intersections. While self-driving cars process immense data using high-performance processors in structured environments, space rovers navigate unstructured, high-radiation terrains constrained by severe power limits and communication latency, historically relying on legacy rad-hardened hardware. Today, this paradigm is shifting. The aerospace sector is actively integrating automotive Deep Reinforcement Learning, hybrid computing, and photorealistic simulations to achieve robust autonomous navigation. Conversely, the automotive industry leverages space-proven fault-tolerance and remote teleoperation strategies to master complex urban edge cases, driving a mutual evolution in robotics.
The convergence of terrestrial autonomous vehicles and planetary rovers reveals profound algorithmic and architectural intersections. While self-driving cars process immense data using high-performance processors in structured environments, space rovers navigate unstructured, high-radiation terrains constrained by severe power limits and communication latency, historically relying on legacy rad-hardened hardware. Today, this paradigm is shifting. The aerospace sector is actively integrating automotive Deep Reinforcement Learning, hybrid computing, and photorealistic simulations to achieve robust autonomous navigation. Conversely, the automotive industry leverages space-proven fault-tolerance and remote teleoperation strategies to master complex urban edge cases, driving a mutual evolution in robotics. This article provides a comprehensive engineering review of the VIPER rover AI navigation system, designed for the extreme conditions of lunar Permanently Shadowed Regions (PSRs). Resurrected for a 2027 Blue Origin launch, VIPER abandons traditional passive solar navigation. Instead, it employs active LED illumination and robust visual odometry to counteract dynamic shadowing. To ensure survival in cryogenic darkness, the architecture leverages computationally efficient grid-based algorithms like D* Lite for real-time hazard avoidance and Extended Kalman Filters (EKF) for precise kinematic slip estimation on porous regolith. Ultimately, VIPER’s hybrid “Earth-in-the-Loop” autonomy establishes the technical baseline for future Artemis surface operations.
This article provides a comprehensive engineering review of the VIPER rover AI navigation system, designed for the extreme conditions of lunar Permanently Shadowed Regions (PSRs). Resurrected for a 2027 Blue Origin launch, VIPER abandons traditional passive solar navigation. Instead, it employs active LED illumination and robust visual odometry to counteract dynamic shadowing. To ensure survival in cryogenic darkness, the architecture leverages computationally efficient grid-based algorithms like D* Lite for real-time hazard avoidance and Extended Kalman Filters (EKF) for precise kinematic slip estimation on porous regolith. Ultimately, VIPER’s hybrid “Earth-in-the-Loop” autonomy establishes the technical baseline for future Artemis surface operations. Space telemetry analysis is shifting from reconstruction-based models like TadGAN to Zero-Shot Anomaly Detection. Traditional generative models struggle in deep space, suffering from overfitting and failing to identify unprecedented operational faults. The TimeRCD framework introduces a paradigm shift via the Relative Context Discrepancy (RCD) approach. Instead of reconstructing nominal data, TimeRCD measures vector discrepancies between local and global temporal contexts using pre-trained Foundation Models. Validated on NASA’s SMAP and MSL datasets, this zero-shot architecture drastically cuts false positives, reduces computational loads on Rad-Hard processors, and paves the way for true onboard spacecraft autonomy.
Space telemetry analysis is shifting from reconstruction-based models like TadGAN to Zero-Shot Anomaly Detection. Traditional generative models struggle in deep space, suffering from overfitting and failing to identify unprecedented operational faults. The TimeRCD framework introduces a paradigm shift via the Relative Context Discrepancy (RCD) approach. Instead of reconstructing nominal data, TimeRCD measures vector discrepancies between local and global temporal contexts using pre-trained Foundation Models. Validated on NASA’s SMAP and MSL datasets, this zero-shot architecture drastically cuts false positives, reduces computational loads on Rad-Hard processors, and paves the way for true onboard spacecraft autonomy. This technical report analyzes the pivotal event of Sol 1707-1709, where Perseverance navigated Mars guided by the Claude Code AI agent. For the first time, an LLM was integrated into the critical path, generating executable Rover Markup Language (RML) code. This “Ground-in-the-Loop” paradigm transcends traditional AutoNav limitations through semantic terrain analysis and terrestrial computing power. Rigorously validated via Digital Twin simulation, the AI successfully directed 456 meters of autonomous driving. This milestone demonstrates Generative AI’s capacity to control physical assets in critical environments, redefining space exploration standards.
This technical report analyzes the pivotal event of Sol 1707-1709, where Perseverance navigated Mars guided by the Claude Code AI agent. For the first time, an LLM was integrated into the critical path, generating executable Rover Markup Language (RML) code. This “Ground-in-the-Loop” paradigm transcends traditional AutoNav limitations through semantic terrain analysis and terrestrial computing power. Rigorously validated via Digital Twin simulation, the AI successfully directed 456 meters of autonomous driving. This milestone demonstrates Generative AI’s capacity to control physical assets in critical environments, redefining space exploration standards. Why doesn’t NASA use standard self-driving car sensors on Mars Rovers? It seems cost-effective, but the reality is harsh. This article dives into the Automotive vs. Space LiDAR debate, analyzing why terrestrial tech—like Luminar’s Iris—fails off-planet. We break down the engineering nightmares of space: deadly cosmic radiation, vacuum outgassing, and extreme thermal cycles that shatter standard electronics. By comparing commercial efficiency against NASA’s reliability, we explain why “good enough” for Earth is fatal on Mars. Plus, discover the surprising exception where a $129 drone part actually made it to the Red Planet.
Why doesn’t NASA use standard self-driving car sensors on Mars Rovers? It seems cost-effective, but the reality is harsh. This article dives into the Automotive vs. Space LiDAR debate, analyzing why terrestrial tech—like Luminar’s Iris—fails off-planet. We break down the engineering nightmares of space: deadly cosmic radiation, vacuum outgassing, and extreme thermal cycles that shatter standard electronics. By comparing commercial efficiency against NASA’s reliability, we explain why “good enough” for Earth is fatal on Mars. Plus, discover the surprising exception where a $129 drone part actually made it to the Red Planet. his analysis explores the technical architecture of China’s Zhurong rover, highlighting how it differs from NASA’s design philosophy. Operating in Utopia Planitia, Zhurong utilizes a hierarchical pathfinding system that combines $A^*$ for global route planning with $D^*$ Lite for dynamic obstacle avoidance. To survive without nuclear power, it employs autonomous “wake/sleep” algorithms based on environmental conditions. Furthermore, the rover mitigates dangerous high-slip interactions using unique active suspension capable of “inchworm” motion and crab walking, allowing it to successfully map geology and hydrated minerals far beyond its nominal 90-sol lifespan.
his analysis explores the technical architecture of China’s Zhurong rover, highlighting how it differs from NASA’s design philosophy. Operating in Utopia Planitia, Zhurong utilizes a hierarchical pathfinding system that combines $A^*$ for global route planning with $D^*$ Lite for dynamic obstacle avoidance. To survive without nuclear power, it employs autonomous “wake/sleep” algorithms based on environmental conditions. Furthermore, the rover mitigates dangerous high-slip interactions using unique active suspension capable of “inchworm” motion and crab walking, allowing it to successfully map geology and hydrated minerals far beyond its nominal 90-sol lifespan.