1. Introduction: The Paradigm Shift in Telemetry
Robotic exploration of the solar system has reached a historical inflection point, determined not by the evolution of propulsion or materials, but by a radical transformation in logical and decision-making paradigms. The event that occurred between December 8 and 10, 2025 (Sol 1707 and 1709) at NASA’s Jet Propulsion Laboratory (JPL) represents the crystallization of this shift. For the first time in the history of aerospace engineering, a Large Language Model (LLM)—specifically Anthropic’s coding agent, Claude Code—was integrated directly into the “critical path” of tactical planning for an extraterrestrial surface asset.
This technical report analyzes the software architecture, interface protocols, and validation mechanisms that made this feat possible, defining a new standard for Generative AI Rover Navigation. The analysis focuses on the upper layers of the technology stack: data ingestion, command synthesis in Rover Markup Language (RML), and simulation via Digital Twin, deliberately excluding legacy hardware components.
1.1 The Operational Context of Sol 1707
The Perseverance rover, located in Jezero Crater, faced complex terrain characterized by boulder fields and sandy regolite deposits. In a traditional operational context, navigating through such obstacles would require intense human micro-planning efforts. However, on the indicated dates, control was delegated to an artificial intelligence system capable of generating executable and verifiable code. The event saw the rover travel 210 meters on Sol 1707 and 246 meters on Sol 1709, utilizing waypoints generated entirely by the AI, a success resulting from the deep integration between Anthropic’s agentic tools and JPL’s Ground Data System (GDS).
2. The Evolution of Ground Systems: From Determinism to the Probabilistic Agent
To understand the magnitude of this integration, it is necessary to contextualize it within the evolution of Martian navigation systems. As detailed in my previous analysis of the architectural shift from Sojourner’s reactive “bump and go” to Perseverance’s predictive systems,this evolution has historically been constrained by “light-time delay”. In early missions such as Sojourner, navigation was almost entirely deterministic and “blind,” limited to a few centimeters per Sol. Subsequently, with the Mars Exploration Rovers and Curiosity, AutoNav was introduced. Although revolutionary, AutoNav is constrained by onboard computing power (radiation-hardened RAD750 processors that are computationally limited) and an intrinsic “myopia,” as it can only process local data without strategic context.
2.1 The Leap Toward “Ground-in-the-Loop” AI
The approach to Generative AI Rover Navigation implemented with Claude represents a third paradigm: artificial intelligence located on Earth (“Ground-Based AI”). Unlike reactive AutoNav, Claude operates on terrestrial computing clusters with virtually unlimited power. This allows for multimodal data fusion (combining HiRISE orbital images, inertial data, and surface imagery) and advanced semantic analysis capable of distinguishing an “unstable rocky outcrop” from a “stable rock” based on vast historical datasets. This shifts complexity from the rover to Earth, while maintaining decision-making autonomy away from the human operator.
3. Integration Architecture: Claude Code and the Agentic Environment
The technological core of the demonstration is not the LLM model itself, but the Claude Code agentic infrastructure. Anthropic developed this tool as an autonomous integrated development environment (IDE) capable of executing actions within the operating system, distinguishing it sharply from traditional chatbots.
In the context of JPL, the agent has direct access to the file system to navigate mission directories, read telemetry, and, crucially, launch pre-processing scripts (Python or Perl). It autonomously manages its own “context window,” using shell commands to decide which information to load without saturating memory.
A critical element for adapting the model is the contextual configuration file, named CLAUDE.md. This document serves as a “living instruction manual,” containing rigorous definitions of RML syntax and safety constraints (Flight Rules), such as slope limits on sandy terrain. The agent consults this file at the beginning of each session, preparing itself to operate like an expert engineer. The decision-making process follows an iterative “Observe-Reason-Act-Verify” cycle: the agent does not merely generate code but rereads and corrects it autonomously (Self-Correction) by comparing it against the rules in CLAUDE.md before submitting it for human validation.
4. The Mission Language: Rover Markup Language (RML)
The tangible output of the AI agent is a file structured in Rover Markup Language (RML). RML is an XML dialect, a “lingua franca” developed at JPL that encapsulates commands, physical parameters with explicit units of measurement, and conditional logic for autonomous fault management.
The technical challenge surmounted during Sol 1707-1709 lies in the LLM’s ability to generate syntactically perfect code in a domain-specific language. Generating XML via AI is notoriously prone to hallucination errors (invented or unclosed tags). However, the integrated system demonstrated the ability to respect rigid XSD schemas and, more critically, to maintain state consistency. RML commands modify the internal state of the rover; the agent must therefore “keep in mind” the virtual position and orientation across a sequence of hundreds of commands, as a calculation error at command #50 would invalidate the entire subsequent sequence.
Furthermore, the choice to use RML guarantees “legacy-compatible innovation”: the files generated by Claude are human-readable and verifiable by JPL’s historical static analysis tools (such as RP-check), integrating AI into the existing pipeline without compromising safety.
5. Verification and Validation: The Digital Twin as Oracle
No generated command is sent to Mars without passing through a rigorous simulation process. For this mission, the role of validator was performed by the Perseverance Digital Twin, an ecosystem of models (Simulink, Hyperdrive, SEQGEN) that replicate the physics and electronics of the rover.
During the validation of Claude’s plans, the engineering team monitored over 500,000 simulated telemetry variables, including kinematic, electrical, and thermal states. The Digital Twin acts as an “Oracle of Truth”: it executes the RML file on a digital terrain model and verifies if any variable violates safety limits (e.g., motor temperatures or battery SoC). Only when the simulation confirms zero violations (“Green Light”) and target achievement within resource margins is the plan approved for uplink. This process provides the deterministic certainty necessary to counterbalance the probabilistic nature of generative AI.
6. Operational Analysis: The Drives of Sol 1707 and 1709
The physical execution of commands on Mars provided definitive empirical validation. In Jezero Crater, the rover had to traverse a mixed zone of fractured bedrock and insidious sand ripples.
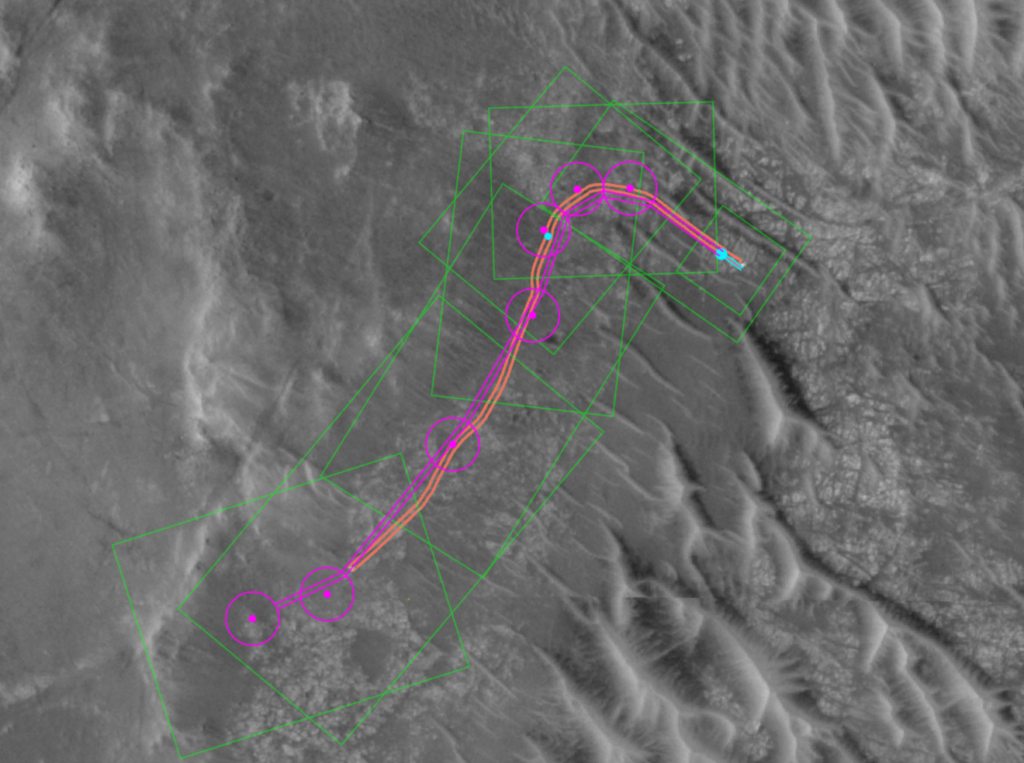
- Sol 1707 (210 meters): Claude planned a route that successfully avoided sand accumulation zones, maximizing traction on the bedrock. The distribution of waypoints showed a nearly human understanding of risk: dense in complex zones, sparse in open areas.
- Sol 1709 (246 meters): The agent demonstrated continuity capabilities, resuming planning from the endpoint of the previous drive and correctly handling position error accumulation (odometry drift).
Semantic Computer Vision
The success of these drives stems from the use of VLM models to interpret the environment. Claude had to correlate the global orbital view (HiRISE) with the local perspective (Navcam). Unlike classical algorithms based solely on geometry, Claude applies semantic labels to risk. The agent is able to infer that a flat zone with a wavy texture corresponds to high-slip sand (based on historical data in the context), assigning it a high traversability cost. This qualitative reasoning capability is the true differential advantage over traditional geometric algorithms.
7. Conclusions and Future Perspectives
The operational demonstration of December 8-10, 2025, was not merely a technological trial, but the validation of a new operational stack for space exploration. By integrating Claude Code into the JPL workflow, NASA demonstrated that Generative AI Rover Navigation can transcend text generation to control physical assets in unstructured environments.
The architectural model that emerged—a Cognitive Layer (LLM) for strategy, an Intermediate Layer (RML) for verifiable structure, and an Executive Layer (Firmware) for deterministic control—suggests a future where scientific autonomy will be standard. This approach reduces the cognitive load on human operators, transforming them from authors into reviewers, and paves the way for missions to ocean worlds (such as Europa or Enceladus) where latency will make direct human control impossible. The 456 meters traversed by Perseverance under AI guidance mark the beginning of an increasingly close partnership between human ingenuity and synthetic autonomy.
References & Further Reading
For researchers and engineers wishing to deepen their understanding of the Ground Data System (GDS) architecture, the Rover Markup Language (RML) syntax, and the historical context of Martian autonomy, we recommend the following resources:
1. Historical Context & Architectural Evolution
- (ENG) The Evolution of Rover AI: From Sojourner’s ‘Bump and Go’ to Perseverance’s AutoNav
- Recommended Pre-reading: Our in-depth analysis of the architectural shift from reactive systems (Sojourner) to predictive onboard autonomy (AutoNav). This context is essential to understand why the shift to “Ground-in-the-Loop” AI represents a distinct third paradigm.
2. The Sol 1707-1709 Event (Primary Sources)
- NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars
- Official Mission Report: NASA’s official confirmation and operational details regarding the December 2025 drives in Jezero Crater.
- Claude on Mars: Technical Case Study
- The AI Perspective: Anthropic’s technical breakdown of how the coding agent was integrated into the JPL workflow, including details on the “Chain of Thought” reasoning used for path planning.
- NASA used Claude to plot a route for its Perseverance rover on Mars
- Industry Analysis: Media coverage analyzing the implications of this milestone for the broader robotics industry.
3. Software & Tooling Documentation
- Claude Code Documentation
- The Agentic IDE: Technical documentation for the “Claude Code” environment used by JPL engineers to interface with the mission file system and execute validation scripts.
- rp_check: The Rover Sequence Validation Tool
- Validation Oracle: Documentation on the legacy static analysis tool (written in Perl) mentioned in Section 4.3. This tool is critical for verifying that AI-generated RML adheres to flight rules.
4. Legacy Standards & RML Specifications
- Maestro and the Evolution of Rover Planning (AIAA) and NASA Technical Reports Server (2011)
- Foundational Papers: These technical papers establish the standards for the Rover Markup Language (RML) and the activity dictionary systems. They provide the necessary background to understand the rigid XSD schemas that Claude had to navigate to produce valid command sequences.
- XML Document Markup Language Resources
- Data Structure: General resources on the XML standards that underpin the interoperability of space systems.

Lascia un commento